When there is a catastrophic pumping unit failure it is natural to wonder what happened and how this failure could have been prevented. However, the right answer may or may not be simple to find. The following list shows the most common reasons for a failure and how to prevent or minimize its occurrence in the future:
Continue readingTag Archives: rod pump
Sucker Rod Pumping Speed Calculation
Sucker-rod pumping units can be operated over a range of pumping speeds. It is expressed in Strokes per Minute (SPM). Obviously, this assumed that the up and down stroke of a unit forms one complete stroke cycle.
Sucker rod pumping speed can be calculated manually using a stopwatch or automatically by the mean of a pump-off controller (POC). This article will detail the manually pumping speed calculation procedure.
Manually Pumping Speed Calculation Procedure:
- Start the stopwatch at the bottom of the stroke and measure the time it takes for the unit to complete 10 strokes.
- Stop the stopwatch at the end of the 10 strokes when the PU is back at the bottom of the stroke. Make a note of the number of seconds it took.
- Convert the number of seconds into minutes (divide by 60).
- Divide 10 (the number of strokes) by the time in minutes to obtain the pumping speed expressed in strokes per minute (SPM).
Exercise: Calculate the pumping speed of this PU.
Beam Pump Artificial Lift Optimization
This article gives you some good practices and rules of thumb for optimizing beam pump applications. The following topics have been presented:
- Artificial Lift Optimization – What does it mean?
- Required information
- Typical design situations
- Optimization considerations
- Simulate / Measure initial conditions
- Pump condition, structure loading, and gearbox Loading
- Miscellaneous notes
- Design Guidelines: Pump Efficiency, Structure Loading, Gearbox Loading
- Case 1: Increase Capacity
- Case 2: Size unit for well w/no unit
- Dialing in your design
- Unit Sizing “Rules of Thumb”
- Sucker Rod Design
- Rod Guides: Snap Ons, Molded Guides
Why Do We Counterbalance Sucker Rod Pumping Units?
A good understanding of counterbalance is vital to the successful operation of surface sucker rod pumping units. Poor counterbalance practices can cause early failure of the gear reducer gearing and will result in excessive energy cost.
Non-counterbalanced lever system:
The up-stroke:
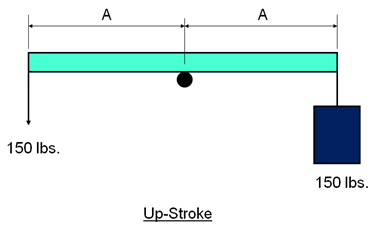
The figure above represents a simple non-counterbalanced lever system. On the up-stroke, by pulling down on the end of a beam, a man is lifting a bucket full of water having a combined weight of 150 lbs.
Note that the upstroke effort of the man is a substantial 150 lbs.
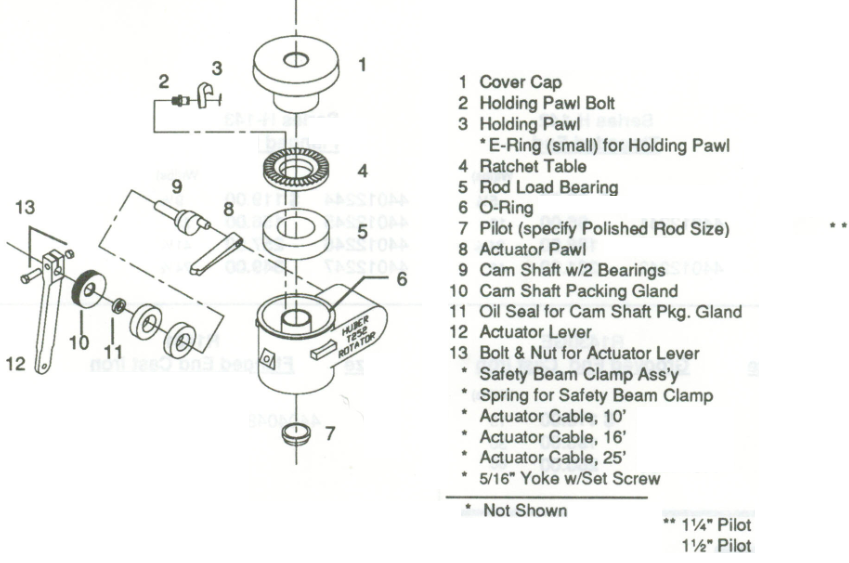
Rod Rotator extends the life of rod-pumped wells
The constant up-and-down movement of a sucker rod creates excessive friction between rods and tubing which can result in premature rod and tubing failures due to excessive wear. If left unchecked, this generally requires a costly intervention to make repairs.
To extend the sucker rod run life, one of the widely used techniques is the use of rod rotators. A rod rotator is a mechanical device installed on the polished rod between the carrier and the polished rod clamp. It incrementally rotates the rod with each stroke. A rotating mechanism with an actuator lever arm is connected to the walking beam with a metal string. As the surface unit moves up and down, it pulls and releases this metal string so that, moves the actuator lever arm up and down. The rotation mechanism is activated and this slowly rotates the polished rod and the rod string below.